

SONET 시스템
SONET(Synchronous Optical Network)은 미국에서 개발되었으며, ANSI(American National Standards Institute)에 의해 표준화된 고속 광섬유 통신을 위한 표준이다.
주로 북미 지역에서 사용된다.
SDH(Synchronous Digital Hierarchy)는 SONET과 같지만 전 세계적으로 사용되는 표준으로, ITU-T(국제전기통신연합 표준화 부문)에 의해 개발됐다.
대부분의 다른 국가에서 널리 사용되고 있다.
사용 지역만 다를 뿐, 각 표준 서로 원활하게 호환된다.
이정도로는 아직 SONET에 대해 이해가 안간다. 별로 와닿지가 않아서..
저번에 배운 osi 계층구조랑 연관지어보면 주로 물리 계층과 데이터 링크 계층에 연관되어서 생각해보자.
SONET은 광섬유를 통해 데이터를 전송하는 물리적 전송에 중점을 둔 시스템이다. 데이터를 광신호로 변환하여 전송하며, 이 신호를 다시 전기적 신호로 변환하는 과정을 지원한다.
즉, 광섬유 네트워크를 통해 고속으로 대용량 데이터를 송수신하는 방식을 SONET 프로토콜이라고 부른다.
그런데 프로토콜 하니까 또 TCP/IP랑 겹쳐지는건가 했는데
SONET과 TCP는 서로 다른 계층에서 각각 동작하는 프로토콜이었다.
TCP는 전송 계층(4계층)에서 동작하고, IP는 네트워크 3계층에서 동작, SONET은 1, 2계층에서 동작하는 프로토콜이다.
TCP는 신뢰성 있는 데이터 전송을 보장하는 프로토콜이다.
즉, 신뢰성만 기억하면 나머지도 자연스럽게 떠오른다.
- 연결 설정 및 해제 (Connection-oriented)
- 패킷의 오류 검출 및 재전송
- 흐름 제어 및 혼잡 제어
- 데이터 전송의 순서를 보장

이 그림은 SONET 시스템이 고속 데이터 전송을 위해 어떻게 구성되어 있는지 알 수 있는 예시이다.
SONET 네트워크는 TDM을 사용하여 데이터를 다중화하고, 그 데이터를 STS 프레임의 Payload로 전송한다.
SONET 시스템의 구성요소
- STS MUX(Multiplexer): 다중화기, 여러 신호를 하나의 고속 신호로 결합하는 장치
- STS DEMUX(Demultiplexer): 역다중화기, 고속 신호를 다시 여러 개의 개별 신호로 분리하는 장치
- Regenerator(재생기): 신호가 장거리 전송 중에 약해지거나 왜곡되는 것을 방지하기 위해 중간에서 신호를 새롭게 재생한다.
- Add/Drop Multiplexer(ADM): 추가적으로 신호를 삽입하거나 제거할 수 있는 장치로, 신호 경로에 영향을 주지 않고 특정 데이터를 전송하거나 수신할 수 있다.
SONET의 계층 구조

SONET은 데이터 전송을 효율적으로 관리하고 유지하기 위해 여러 계층으로 나누어져 있다.
데이터 링크 계층 (Data Link)
- Path Layer (경로 계층):
- 역할: 종단 간(end-to-end) 데이터 전송
- 기능: 데이터의 무결성을 보장하고, 경로를 따라 데이터가 올바르게 전달되도록 한다.
- Line Layer (라인 계층):
- 역할: 다중화된 신호를 관리하고, 신호의 재생 및 오류 검출
- 기능: 신호의 무결성을 유지하고, 중간 노드에서 신호를 재생하여 장거리 전송을 가능하게 한다.
- Section Layer (섹션 계층):
- 역할: 물리적 전송 매체를 통해 신호를 전송
- 기능: 신호의 동기화, 오류 검출 및 수정, 신호의 전송 상태 모니터링을 담당한다.
물리 계층 (Physical)
- Photonic Layer (광자 계층):
- 역할: 광섬유를 통해 실제로 데이터를 전송
- 기능: 광 신호를 생성하고, 전송, 수신한다.
이렇게 각 계층과 기능을 나누는 것으로, 전체 시스템의 효율성과 신뢰성을 높일 수 있다.
각 계층 별 캡슐화

데이터가 전송되기 전에 여러 계층을 거치면서 패키징되고, 최종적으로 광 신호로 변환되어 전송되는 과정이다.
각 계층을 통해 데이터가 어떻게 처리되는지를 알 수 있다.
Electronic Data (전자 데이터):
- 초기 데이터 입력: 전자 데이터는 캡슐화 과정의 시작점이다.
- Path Layer (경로 계층):
- 데이터 분할: 전자 데이터가 경로 계층에서 분할되고 패키징된다.
- 기능: 종단 간(end-to-end) 데이터를 전송
- Line Layer (라인 계층):
- 데이터 다중화: 경로 계층에서 분할된 데이터가 라인 계층에서 다중화된다.
- 기능: 신호의 무결성을 유지하고, 중간 노드에서 신호를 재생하여 장거리 전송을 가능하게 한다.
- Section Layer (섹션 계층):
- 신호 동기화: 라인 계층에서 다중화된 데이터가 섹션 계층에서 동기화되고 오류 검출 및 수정이 이루어진다.
- 기능: 신호의 동기화, 오류 검출 및 수정, 신호의 전송 상태 모니터링
- Photonic Layer (광자 계층):
- 광 신호 변환: 섹션 계층에서 동기화된 데이터가 광자 계층에서 광 신호로 변환된다.
- 기능: 광섬유를 통해 실제로 데이터를 전송. (이진수 형태로 전송)
STS-1 프레임 구조

STS-1(Synchronous Transport Signal level 1)은 SONET에서 사용하는 기본 전송 속도 단위이다.
STS-1은 일정한 크기의 프레임으로 데이터를 나눠서 전송하는데, 각각의 프레임은 6480비트의 크기를 갖고있다.
1초에 8000개의 프레임을 전송할 수 있으므로, STS-1의 데이터 전송 속도는
8000 프레임/초 × 6480 비트/프레임 = 51,840,000 비트/초(51.84 Mbps)이다.
STS-1 프레임 오버헤드

STS-1 프레임 오버헤드는 SONET(Synchronous Optical Networking) 시스템에서 데이터 전송의 효율성 및 신뢰성을 보장하기 위해 사용된다.
이 프레임은 크게 두 부분으로 나뉜다.
- Transport Overhead (TOH) <그림 윗부분>: 27바이트로 구성되어 있으며, 프레임의 동기화, 오류 검출, 경로 관리 등의 기능을 제공
- Synchronous Payload Envelope (SPE) <그림 아래 부분>: 783바이트로 구성되어 있으며, 실제 사용자 데이터를 전달
Transport Overhead (TOH)의 세부 구성
- Section Overhead (SOH): 9바이트. 프레임의 동기화와 오류 검출 등을 담당하는 기능.
- Regenerator Section Overhead (RSOH): 3바이트. 프레임의 동기화와 오류 검출을 지원하는 기능.
- Multiplex Section Overhead (MSOH): 6바이트. 오류 관리, 신호 상태 모니터링, 경로 신호에 사용
- Line Overhead (LOH): 18바이트. 경로 상태 모니터링, 알람, 유지 보수, 데이터 복구, 비트 오류 모니터링 등의 기능을 지원하는 오버헤드.
Synchronous Payload Envelope (SPE)의 세부 구성
- Path Overhead (POH): 9바이트로 구성되어 있으며, 사용자 데이터 전송 경로의 오류 검출 및 경로 관리를 지원
STS-1 프레임은 이 두 개의 프레임을 다해서 총 810바이트 (9행 x 90열)로 구성되어 있다.
이러한 오버헤드는 네트워크의 안정성을 높이고 데이터 전송 과정에서 발생할 수 있는 오류를 최소화하는 데 중요하다.
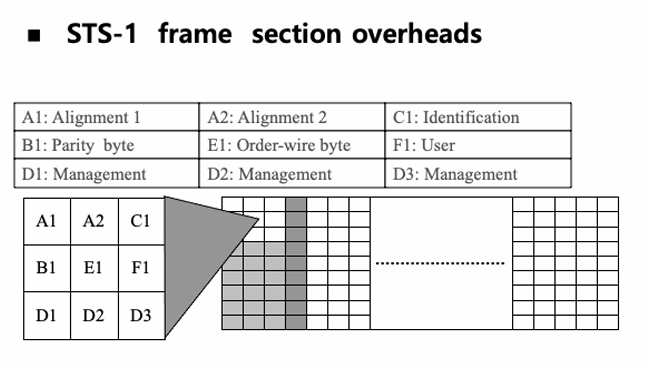
Section Overhead (SOH)는 STS-1 프레임의 처음 9바이트로 구성되며, 주로 신호 동기화, 오류 검출 및 수정, 경로 관리, 유지보수 등을 한다.
- A1, A2: 프레임의 시작을 식별하기 위한 동기화 바이트.
- B1: 비트 오류 검출을 위한 패리티 정보.
- E1: 운영자 간 음성 통신을 위한 채널.
- F1: 네트워크 관리자가 자유롭게 사용할 수 있는 사용자 채널.
- D1-D3: 관리 채널로, 네트워크 관리 정보를 전송하는 데 사용.

Line Overhead (LOH)는 주로 다중화된 신호의 상태를 모니터링하고 관리하기 위해 사용된다.
- H1, H2, H3: 포인터로서, SPE(Synchronous Payload Envelope)의 시작 위치를 알려주는 역할.
- B2: 비트 오류를 모니터링하기 위한 패리티 정보.
- K1, K2: 자동 보호 스위칭을 위한 신호.
- D4-D12: 데이터 통신 채널.
- Z1, Z2: 확장 바이트로, 미래의 확장성을 위해 예약된 공간.

Path Overhead (POH)는 페이로드의 시작 부분에 위치하여 전송 경로 내의 데이터를 관리한다.
- J1: 데이터 경로의 무결성을 확인하기 위한 신호.
- B3: 페이로드의 오류를 모니터링하기 위한 패리티 정보.
- C2: 페이로드의 콘텐츠 유형을 식별하기 위한 레이블.
TDM을 사용하여 다중화된 SONET 네트워크 데이터를 STS 프레임의 Payload로 전송한다.

Payload Pointer는 STS-1 프레임 내에서 Synchronous Payload Envelope (SPE)의 시작 위치를 나타내는 오버헤드 정보이다.
이것은 SONET과 SDH 네트워크에서, 다양한 비동기 신호들이 하나의 프레임 내에서 동기화될 수 있도록 도와주는 핵심 요소다.
- SPE 시작 위치 지정: STS-1 프레임에서 SPE는 전송될 데이터가 포함된 부분이다. 이 SPE는 STS-1 프레임 내에서 고정된 위치에 있지 않고 이동할 수 있으며, Payload Pointer는 SPE가 프레임 내 어디에서 시작하는지 알려준다.
- 동기화 문제 해결: 네트워크 내의 다양한 신호들이 서로 다른 클럭 주기로 동작하기 때문에, 이러한 신호들의 동기화가 필요하다. Payload Pointer는 비동기 신호를 관리하고, 상위 프레임 구조 내에서 정확한 데이터의 위치를 동기화하는 데 사용된다.
Payload Pointer의 구조
Payload Pointer는 STS-1 프레임의 Line Overhead(LOH) 부분에 위치한 H1, H2 바이트로 구성된다.
이 바이트들은 SPE의 시작 위치를 나타내며, 오프셋 값을 나타낸다.
- H1과 H2: SPE의 시작 위치가 어디인지를 알려주며, 0부터 783까지의 값을 가질 수 있다. 이는 810바이트 프레임 중에서 SPE가 시작될 수 있는 오프셋을 의미한다.
- H3 바이트 (Negative Justification Byte): 클럭의 속도 차이를 보정하는 역할을 한다. 이 바이트는 데이터 전송 속도가 상이할 때 데이터를 조정하거나 삽입 및 삭제하는 역할을 하여 속도 차이를 보정한다.
예를 들어, 수신된 데이터 속도가 전송된 데이터보다 빠를 때 H3 바이트는 추가된 데이터를 삽입하여 속도 차이를 줄여주고, 반대로 느릴 경우 데이터를 제거하여 속도 차이를 보정한다.
Payload Pointer 동작 원리
- Offset 설정: Payload Pointer는 STS-1 프레임의 첫 번째 바이트로부터 SPE가 시작되는 위치를 바이트 단위로 표현한다. 예를 들어, Pointer 값이 87이면, SPE는 STS-1 프레임의 88번째 바이트( SPE가 STS-1 프레임의 첫 번째 바이트부터 87바이트를 건너뛰고 시작 )부터 시작된다.
- Justification(조정): 네트워크 내에서 클럭의 미세한 차이에 의해 발생하는 속도 불일치를 보정한다. 데이터 속도가 상이할 경우, Payload Pointer는 SPE 위치를 위 또는 아래로 이동시켜 동기화를 유지한다. 이 과정에서 H3 바이트가 사용되며, 필요할 때 데이터를 삽입하거나 제거하여 속도를 조정한다.
이런 원리를 이용해서 Payload Pointer는 SONET/SDH 네트워크에서 데이터 전송 중 발생할 수 있는 비동기 신호, 클럭 차이, 동기화 문제 등을 해결한다.
Virtual Tributaries (VTs)

VT는 낮은 속도의 디지털 신호를 SONET 내에서 다중화하여 전송하기 위한 구성 요소이다.
SONET과 같은 고속 네트워크에서는 큰 대역폭을 사용하는 경우가 많다. 하지만 낮은 속도의 디지털 신호를 고속 전송망으로 전송할 필요가 있을 때가 종종 있는데, 이러한 낮은 속도의 신호를 SONET 네트워크에 맞게 다중화하기 위해 Virtual Tributary(VT)가 사용된다.
VT는 Synchronous Payload Envelope(SPE) 내부에서 작은 하위 경로로 동작하며, 다양한 속도의 신호를 다중화하여 전송할 수 있다.
- VT1.5: 1.544 Mbps의 신호를 다중화.
- VT2: 2.048 Mbps의 신호를 다중화.
- VT3: 3.152 Mbps의 신호를 다중화.
- VT6: 6.312 Mbps의 신호를 다중화.
이렇게게 다중화된 상태로 전송되며, 상위 속도의 SONET 신호에 적합하게 관리된다.
VT 다중화 과정
SONET 시스템에서는 낮은 속도의 신호를 Virtual Tributary(VT)에 맞게 분할하고, 이를 STS-1 프레임의 페이로드에 넣어 고속으로 전송할 수 있도록 다중화한다. 이 과정에서 VT는 SONET의 하위 신호를 다룰 수 있는 구조로서 역할을 한다.
예를 들어, VT1.5는 1.544 Mbps의 신호를 다중화하여 전송할 수 있다.
정리하자면 VT는 낮은 속도의 신호를 고속 네트워크에서 전송할 수 있고, 여러 다양한 서비스의 신호를 하나의 경로로 통합할 수 있어 네트워크 운영과 관리가 효율적이다.
VT 구조들)
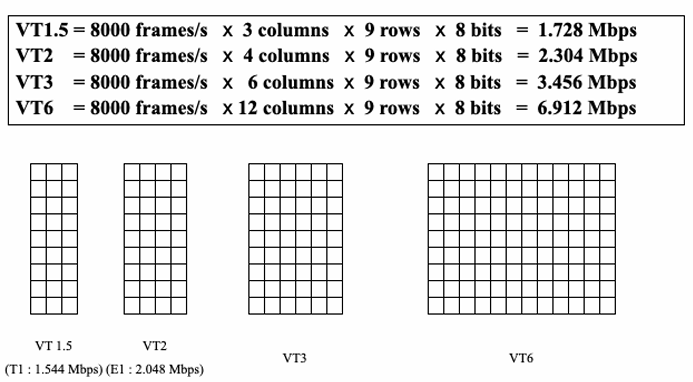
VT는 여러 크기로 제공되며, 각 크기는 특정 전송 속도와 대응된다.
- VT1.5:
- 속도: 1.544 Mbps
- 프레임 구성: 3열 × 9행 × 8비트
- 용도: T1 신호를 다중화
- VT2:
- 속도: 2.048 Mbps
- 프레임 구성: 4열 × 9행 × 8비트
- 용도: E1 신호를 다중화
- VT3:
- 속도: 3.152 Mbps
- 프레임 구성: 6열 × 9행 × 8비트
- 용도: 3.152 Mbps의 신호를 다중화
- VT6:
- 속도: 6.312 Mbps
- 프레임 구성: 12열 × 9행 × 8비트
- 용도: 6.312 Mbps의 신호를 다중화
참고)
SONET/SDH STS-1 외의 프레임 형식

이 그림은 SONET과 SDH의 프레임 구조가 어떻게 상호 호환되는지 보여준다.
SONET OC-1 프레임은 90옥텟 크기, SDH STM-N 프레임은 270 × N 옥텟 크기로 구성되어 있다.
둘 다 비슷한 방식으로 동작하며, 섹션 오버헤드와 페이로드(실제 데이터)로 이루어져 있다.
따라서 서로 다른 표준을 사용하지만, 프레임 구조와 데이터 전송 방식이 유사하기 때문에 상호 호환이 가능하다.
STS(Synchronous Transport Signal) 페이로드 구조

- Payload (페이로드):
- 여러 개의 페이로드 블록은 수평으로 나열되어 있으며, 이는 데이터가 연속적으로 전송되는 것을 의미한다.
- Byte Interleaving :
- 각 페이로드 블록에서 데이터의 일부를 여러 소스에서 가져와 혼합하여 단일 스트림으로 전송하는 방식이다.
이 방법은 데이터 전송의 효율성을 높이고 오류를 줄이는 데 기여한다.
- 각 페이로드 블록에서 데이터의 일부를 여러 소스에서 가져와 혼합하여 단일 스트림으로 전송하는 방식이다.